






|
|
|
|
|
|
|
|
|

|
Fakty o Cygnus-2 -- bezzałogowym balonie stratosferycznym:
|
Gdy byłem małym dzieckiem, wypuściłem kilka zabawkowych baloników
i patrzyłem, jak znikają ponad Zatoką Gdańską. Myślałem o
przywiązaniu do nich jakiejś elektroniki, kamery telewizyjnej i nadajnika
radiowego, by w ten sposób zdalnie zwiedzić wybrzeże. Zdawałem sobie sprawę,
że takie przedsięwzięcie byłoby poza możliwościami finansowymi i
technicznymi młodego
człowieka, ale pomysł pozostał. Od tego czasu zawsze interesowało mnie,
kiedy ktoś posyłał coś w górę. :-)
Kilka miesięcy temu (a tekst ten piszę w czerwcu 2006), kiedy szukałem w
Sieci paru rzeczy związanych z radioamatorstwem, natknąłem się na stronę
grupy w USA, zajmującej się balonowymi lotami wysokościowymi. To było to!
Wiedziałem, że trzeba będzie użyć balonu meteorologicznego. Po wielu
nieprzespanych nocach i dźwiganiu kilkuset kilogramów butli z helem --
sukces!
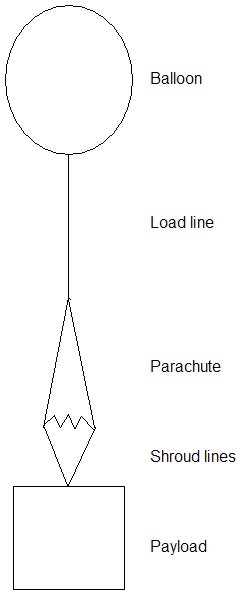 Wysokościowa część balonu składa się z lateksowej powłoki (meteorologiczny
balon do sondowania atmosfery, zaprojektowany tak, by pękał
po osiągnięciu odpowiedniej wysokości), plecionej linki nylonowej połączonej
ze spadochronem i ładunku użytecznego -- pojemnika zabezpieczonego przed
wpływem środowiska. Pojemnik zawiera awionikę, systemy komunikacyjne,
aparaty i eksperymenty meteorologiczne.
Wysokościowa część balonu składa się z lateksowej powłoki (meteorologiczny
balon do sondowania atmosfery, zaprojektowany tak, by pękał
po osiągnięciu odpowiedniej wysokości), plecionej linki nylonowej połączonej
ze spadochronem i ładunku użytecznego -- pojemnika zabezpieczonego przed
wpływem środowiska. Pojemnik zawiera awionikę, systemy komunikacyjne,
aparaty i eksperymenty meteorologiczne.
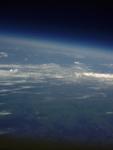
Warunki podczas lotów wysokościowych (zwanych "Near Space", w pewnym sensie
zarozumiale, bo osiągane wysokości sięgają do połowy drogi w kosmos :-)
są raczej nieprzyjazne, a wymagania stawiane ładunkom, a zwłaszcza awionice --
wysokie. Różnica temperatur wynosi od +30°C na ziemi do -60°C na
trzydziestu kilometrach, ciśnienie powietrza zbliża się do zera, niebo jest
całkowicie czarne i widać krzywiznę Ziemi.
Cały ładunek wiruje i kołysze się, zwłaszcza po pęknięciu balonu. Lądowanie
może być twarde, jeśli splączą się linki spadochronu lub lot zakończy się na
twardej nawierzchni. Wszystko powinno być wytrzymałe i jednocześnie lekkie, ponieważ
wzrost wagi wiąże się z mniejszą osiągalną wysokością, nie wspominając
o dość rygorystycznych przepisach.
Musiałem zdecydować, jakie funkcje miał spełniać balon. Do pojemnika
ładunku balonów trafiają najróżniejsze urządzenia: aparaty, przemienniki
radioamatorskie, liczniki Geigera itp. Przy pierwszym locie skoncentrowałem
się na powodzeniu startu, śledzeniu i odzyskaniu balonu; zdjęcia były miłym
dla oka dodatkiem.

| 
| 
|
| Balon | Pojemnik ładunku użytecznego | Spadochron |
Zadzwoniłem do Insytutu Meteorologii i Gospodarki Wodnej
z zapytaniem, skąd biorą balony. Skierowano mnie do Ośrodka Aerologii
w Legionowie, gdzie dowiedziałem się, że balony kupują w firmie
Kaymont
i u dostawcy z Japonii. Przesyłka z Japonii byłaby nieopłacalna, zdecydowałem
się więc na Kaymont. Kupiłem 1500-gramowy balon do sondażu atmosfery,
KCI1500
za 90$.
Spadochron to standardowy model do modeli rakietowych, R7C, za 46$ ze sklepu
Rocketmana.
Wybór linki łączącej balon ze spadochronem był dość problematyczny. Ze
względu na bezpieczeństwo ruchu powietrznego, przepisy wymagają, by linka przerywała
się przy uderzeniu o sile nie większej niż 230 N, jednak nie został podany
rodzaj siły. Zdecydowanie nie jest to siła naciągu; linka zrywająca się przy
230 N siły naciągu pękłaby podczas wypuszczania balonu.
Na szczęście informacje na stronie
EOSS
rozwiały moje wątpliwości. Użyłem plecionej linki nylonowej i pętli ze sznurka
sizalowego do przywiązania linki do balonu (sznurek sizalowy nie jest
śliski). Każdy węzeł został zabezpieczony dobrej jakości taśmą naprawczą
(tak! jestem fanem klejenia wszystkiego taśmą naprawczą, o ile to naprawdę
dobra taśma, a nie podróbka). Linka nylonowa została przywiązana do pętelki
na czubku spadochronu, a spadochron połączony z ładunkiem, dzięki czemu nie
trzeba wypuszczać i rozwijać spadochronu -- jest cały czas rozwinięty i czeka
tylko na pęknięcie balonu. :-)
Obecne (w lipcu 2006) przepisy dotyczące balonów wolnych bezzałogowych
znajdują się w Dzienniku Ustaw nr 414/2004. W skrócie: nie ma problemu,
o ile waga ładunku nie przekracza 3 kg, gęstość powierzchniowa nie przekracza
13 g/cm2, a linka łącząca ładunek użyteczny
z balonem pęka przy uderzeniu o sile 230 N lub mniejszej. Należy oczywiście
wystąpić o odpowiednie zezwolenie. Ustalenie wszystkich szczegółów zajęło mi
kilka dni, kilka razy przekierowywano mnie z jednego urzędu do drugiego,
w końcu jednak udało mi się ustalić, że za wydawanie zezwoleń odpowiedzialna
jest
Agencja Ruchu Lotniczego.
Dzięki bardzo pomocnemu pracownikowi ARL, otrzymałem zezwolenie w ciągu
tygodnia. Agencja publikuje w takich przypadkach odpowiedni komunikat NOTAM
(Notice to Airmen), ostrzegający pilotów o zbliżającym się locie balonu.
Awionika powinna być tak lekka i tak wytrzymała, jak to tylko możliwe.
Mogłem wybrać jedno z komercyjnie dostępnych urządzeń o niskim poborze
prądu, zdecydowałem się jednak na zaprojektowanie elektroniki od podstaw -- w
końcu to miała być zabawa. :-)
Komputer lotniczy i awionika Cygnusa to oparte na mikroprocesorach,
wyspecjalizowane wymienne moduły, komunikujące się między sobą za pomocą
interfejsów szeregowych małej prędkości. Jako procesorów użyłem
8-bitowych
RISC-ów AVR firmy Atmel.
AVR-y mają mnóstwo wbudowanych dodatkowych funkcji, dzięki którym
są (według mnie :-) lepsze, niż PIC czy podobne mikrokontrolery.
Udowodniły też wcześniej swą przydatność w ciężkich warunkach i przy
zakłóceniach radiowych.
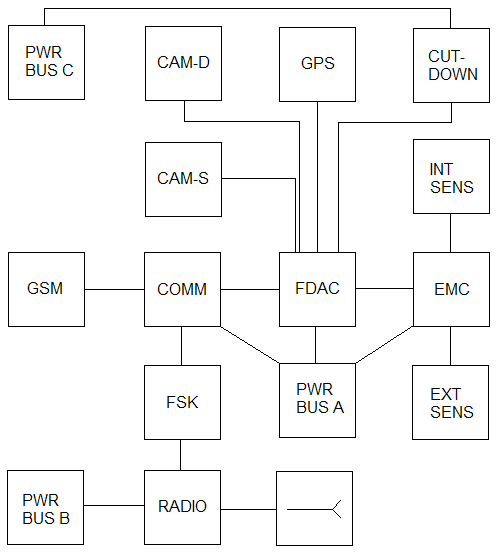 Serce awioniki składa się z trzech głównych komputerów:
Serce awioniki składa się z trzech głównych komputerów:
FDAC zawiera główną logikę lotu. Zarządza innymi modułami, podejmuje decyzje
kontroli lotu na podstawie zewnętrznych i wewnętrznych danych, a także
uruchamia eksperymenty pokładowe. FDAC pracuje w czasie rzeczywistym; ma
"uszy" -- moduły GPS, COMM i EMC, "oczy" -- aparaty-kamery skierowane w stronę
horyzontu i w stronę ziemi, ma też "rękę z nożem" -- urządzenie do awaryjnego
odcinania balonu. FDAC kontroluje też generator piezoelektryczny o głośności
80 dB i ultrajasną diodę LED -- w przypadku, gdyby poszukiwanie ładunku
odbywało się w nocy.
Moduł COMM zarządza komunikacją z balonem, do czego służą dwa systemy:
zbudowany przeze mnie moduł modemu FSK (modulacja Frequency Shift Keying),
oparty na układzie modulatora-demodulatora FSK firmy
CML Microcircuits,
przesyłający telemetrię w formacie tekstowym ASCII i odbierający polecenia.
Konstrukcja modemu pozwala na użycie dowolnego nadajnika/odbiornika
radiowego z wejściem mikrofonowym i zewnętrznym kluczowaniem -- od
ręcznych radiostacji krótkofalarskich na pasmo 2 m do małych modułów
radiowych na pasmo ISM. Zastosować można anteny dipolowe, j-pole,
a nawet lepsze "gumówki", o ile istnieje coś takiego jak dobra antena
gumowa. :-) Wybrałem j-pole z symetrycznego (płaskiego) kabla telewizyjnego.
Łatwo ją zrobić, a co najważniejsze -- jest giętka i nie potrzebuje żadnego
mocowania ani wsporników.
Drugi system komunikacyjny to telefon komórkowy. GSM nie został
zaprojektowany dla telefonii lotniczej i żadne anteny sektorowe czy dookólne
nie są skierowane w niebo. W miarę wznoszenia balon "widzi" horyzont coraz
dalej i możliwa jest komunikacja z odległymi stacjami bazowymi GSM.
Testy praktyczne wykazały jednak, że sygnał GSM zanika powyżej 650 metrów.
Nie jest więc tak, jak uczą nas filmy akcji! Jeśli pamiętamy o
ograniczeniach systemu, telefon GSM to nadal użyteczna pomoc przy
poszukiwaniach -- wysyła pozycję miejsca lądowania SMS-em.
Użyłem Nokii 6310 -- to telefon na tyle stary, by mieć w miarę dobrą sekcję
radiową (jednak nie tak dobrą, jak 6110) i na tyle nowoczesny, by używać
komend Hayes AT, zamiast protokołu FBUS Nokii (FBUS to prawdziwe piekło do
oprogramowania -- rozpracowanie wysyłania SMS-ów FBUS-em zajęło mi ponad 15
godzin; kiedy użyłem komend AT, programowanie trwało krócej niż podłączenie
przewodu :-). Wykorzystałem standardowy kabel szeregowy Nokii, DLR-3P;
podłączyłem go do sprzętowego UART-u modułu COMM.
Moduł COMM komunikuje się z FDAC-em za pomocą interfejsu szeregowego o
szybkości 300 bps.
Moduł EMC odpowiada za próbkowanie i formatowanie danych dotyczących
otoczenia, pobieranych z wewnętrznych i zewnętrznych czujników: temperatury
zewnętrznej, zewnętrznego absolutnego ciśnienia powietrza, temperatury
wewnętrznej, temperatury głównej baterii, temperatury radia.
Użyłem cyfrowego czujnika temperatury DS18B20 firmy Dallas (obecnie
Dallas/Maxim)
i czujnika ciśnienia absolutnego Motorola MPX. Czujnik wilgotności względnej
Honeywell nie dotarł
do mnie na czas, więc nie poleciał.
Moduł EMC komunikuje się z FDAC-em za pomocą interfejsu szeregowego
o szybkości 1200 bps.

| 
| 
|
| Zewnętrzne czujniki -- zalane gorącym klejem, w obudowie DB25 | Wewnętrzne czujniki | Oprogramowanie do telemetrii dla stacji naziemnej |
Urządzenie do awaryjnego odcinania balonu zamontowane jest na czubku
spadochronu. Głównym elementem jest kawałek drutu NiCr (chromonikielinowego)
ciasno zwinięty wokół linki łączącej balon ze spadochronem i przykręcony
śrubami-elektrodami do płytki drukowanej. Przepływ prądu w drucie NiCr
załączany jest dziesięcioamperowym MOSFET-em i kontrolowany przez FDAC.
Drut rozgrzewa się do czerwoności w czasie poniżej sekundy i topi nylonową
linkę, oddzielając balon od spadochronu i rozpoczynając opadanie.
Z powodu wysokiego obciążenia prądowego drutu NiCr, obwód odcinania zasilany
jest z oddzielnej, małej baterii.
Systemu odcinania używa się z dwóch powodów. Po pierwsze, jeśli balon
osiągnie stan neutralnej wyporności (tj. nie wzniesie się na wysokość,
na której następuje jego pęknięcie) i pozostanie w powietrzu wystarczająco
długo, by spowodować zagrożenie w ruchu powietrznym (czytałem, że czasami
się to zdarza). Drugi powód to "ucieczka" balonu. Mechanizmu odcinania
używamy, gdy oczywiste stanie się, że balon przebędzie zbyt dużą
odległość od miejsca wypuszczenia, by opłacalne było jego odzyskanie
lub wyląduje w niedostępnym miejscu, na przykład na bagnach.

Musiałem znać pozycję balonu, by zapisywać wysokość
lotu (zastosowanie ciśnieniowego wysokościomierza nie wchodziło w grę z
powodu braku możliwości jego dokładnej kalibracji w amatorskim warsztacie
i z powodu zbyt niskiego ciśnienia na dużych wysokościach; altimetr radarowy
przekracza amatorski budżet i jest zbyt ciężki) i odnaleźć ładunek po
lądowaniu. Wybór był oczywisty: odbiornik GPS.
Po wnikliwych poszukiwaniach zdecydowałem się na
Garmin GPS-35
za 180$.
Nie jest to najlepszy z odbiorników, jeśli chodzi o czułość -- oparto go o
stary układ Garmina. Nie może się równać z nowoczesnymi odbiornikami na Sirf
Star III. Jest jednak zabezpieczony przed wpływem warunków zewnętrznych,
nie wymaga dodatkowych elementów (odbiornik i antena w jednej obudowie --
stąd jego nazwa "trackpack") i był z powodzeniem używany przez grupy
balonowe na całym świecie. Wiadomo również, że nie ma ograniczeń dotyczących
wysokości, jak niektóre konsumenckie GPS-y. Wybrałem podmodel GPS-35LVS,
przeznaczony dla niskich napięć zasilania (3,6 V do 6 V) i wysyłający poziomy
napięć RS-232 na dwóch portach szeregowych. Zasiliłem GPS napięciem 5 V
z szyny zasilania A i podłączyłem pierwszy port szeregowy (wysyłający
komunikaty NMEA, w ASCII, 4800 bodów) do sprzętowego UART-u FDAC-a.
Aparaty fotograficzne zastosowane w pierwszym locie musiały mieć jedną właściwość: niski koszt.
;-) Naprawdę, nie było sensu stosowania drogich, multimegapikselowych
urządzeń do lotu testowego, kiedy nie wiedziałem nawet, czy będę w stanie
odzyskać ładunek. Potrzebne były dwie cechy: możliwość połączenia przycisku
migawki z wyjściem komputera pokładowego i możliwość zablokowania funkcji
automatycznego wyłączania, radośnie dołączanej ostatnimi czasy przez
producentów aparatów. :-) I znowu, trzeba było przeprowadzić poszukiwania.
Znalazłem miniaturową cyfrówkę
Aiptek PenCam 1.3 Mega
i kupiłem dwie
tutaj, po ok. 90 zł
za sztukę - to niekoniecznie cena promocyjna. ;-)
Te aparaty są właściwie zabawkami, nie użyłbym ich nawet do zrobienia
zdjęcia do albumu rodzinnego. Według producenta mają matrycę 1,3 Mpix,
ale jakość kolorów, rozbłyski i artefakty kompresji JPEG powodują,
że nie da się używać trybu wysokiej jakości. Poprzestałem na trybie niskiej
jakości VGA (640x480). Aparaty mają wbudowane 16 MB pamięci flash,
co wystarcza na około 190 zdjęć w trybie VGA. Zazwyczaj zasilane są dwiema
bateriami AA, ale dostępna jest bardzo przydatna funkcja: zasilanie przez USB.
W trybie zasilania USB nie trzeba wkładać baterii do aparatu,
przełącznik on/off jest niekatywny (nie trzeba więc martwić się o
przypadkowe wyłączenie), a co najważniejsze -- zablokowana jest funkcja
automatycznego wyłączania. Dokupiłem dodatkowy przewód USB (do przesyłania
zdjęć do komputera), przeciąłem dwa przewody, które przyszły razem z
aparatami i podłączyłem je do 5 V szyny zasilania A. Dzięki mojej żonie,
która potrafi otworzyć praktycznie wszystko bez uszkadzania, :-)
otworzyliśmy tajwańskie, plastikowe obudowy aparatów. Zamieniłem przycisk
migawki na przewód; szybka próba potwierdziła, że można wyzwalać migawkę
tranzystorem NPN. Został jeszcze jeden przycisk, wyboru trybu. Nie chciałem
nic z nim robić, ponieważ był SMD, a poza tym pomyślałem, że być może będę
musiał przełączać tryb działania ręcznie, zostawiłem więc ten przycisk
w spokoju. Aparaty nie potrafią zapamiętać trybu, w którym się znajdowały
przed wyłączeniem zasilania, trzeba więc za każdym razem przełączać je w tryb
niskiej jakości.

| 
| 
|
| Płytka drukowana PenCam 1.3 usunięty przycisk migawki | Przewód zdalnej migawki | Aparaty gotowe do instalacji |

Biorąc pod uwagę trudne warunki zewnętrzne, jedynym opłacalnym źródłem
zasilania były nieładowalne ogniwa litowe (nie mylić z
akumulatorkami litowo-jonowymi i litowo-polimerowymi). Baterie litowe mogą
pracować w niskich i wysokich temperaturach i dostarczać prąd o większym
natężeniu niż inne dostępne na rynku ogniwa. Istnieją dwa rodzaje baterii
litowych: wojskowe zestawy baterii z 3 V ogniwami z chemią litowo-manganową
(Li/Mn O2) oraz konsumenckie baterie AA/AAA
o napięciu 1,5 V, z chemią litowo-dwusiarczkowo-żelazową
(Li/Fe S2). Wojskowe baterie litowe byłoby
prawdopodobnie bardzo trudno dostać w Polsce, poprzestałem więc na
bateriach AA
Energizer L91.
Kupiłem je
tu,
dostarczane są w paczkach po dwie za około 20 zł.
Według specyfikacji, pracować mogą w temperaturach od -40 do 60°C,
mają pojemność 3000 mAh i zezwalają na stały pobór prądu o natężeniu 2 A.
Są o wiele lżejsze niż baterie alkaliczne, ważą tylko 14,5 grama!
Ustawiłem je w zestawach po sześć -- razem 9 V, po jednym zestawie dla każdej
szyny zasilania. Okazało się, że zamówione pojemniki na baterie są bardzo
słabej jakości -- zrobione z miękkiego plastiku, z cienkimi sprężynkami w
roli elektrod ujemnych. Nie pomogło nawet przyklejenie baterii do pojemników
taśmą naprawczą; wystarczył jeden wstrząs by wywołać utratę zasilania.
Oczywiście taka sytuacja była nie do zaakceptowania, na szczęście udało mi
się znaleźć sprytny, prowizoryczny sposób naprawy -- między baterie a
elektrody dodatnie włożyłem spłaszczone blaszki z wtyczek BNC, zalałem cały
pojemnik gorącym klejem i na koniec zakleiłem taśmą naprawczą. To dopiero
improwizacja!
Szyna zasilania A potrzebowała 5 V, użyłem więc regulatora obniżającego
napięcie w wersji low-dropout,
National
Semiconductor LM2940. Wyposażony w standardowy radiator TO220,
regulator był jednocześnie grzejnikiem dla ładunku balonu, generując około
50-60°C. Szyna A pobierała dokładnie 500 mA (łącznie z aparatami i GPS-em).
Większość elektroniki składa się z modułów o rozmiarze 10 na 8 cm,
przytwierdzonych do płatów plastiku spinaczami do kabli. Pomiędzy plastikiem
a płytkami drukowanymi znajduje się gąbka neoprenowa, służąca za amortyzator.
Wybrałem standard wtyków męskich i gniazdek żeńskich DB9. Połączenia tego
typu w metalowych obudowach są czasami używane w awionice satelitów.
Nie mogłem sobie pozwolić na dodatkowy ciężar, użyłem więc plastikowych
obudów. Wszystkie części elektroniczne to wersje przemysłowe, mogące według
specyfikacji pracować poniżej 0°C. Części biorę
stąd.

| 
| 
|
| Świeże płytki, prosto z firmy, w której je zamówiłem :-) | Konstukcja i testy awioniki | Część awioniki na paletach testowych |
Pojemnik zbudowałem tak, aby był mocny i by dało się go użyć wielokrotnie.
Jego głównym przeznaczeniem jest utrzymywanie ciepła dla awioniki
w ekstremalnym mrozie na dużych wysokościach.
Ścianki pojemnika zrobione są ze styropianu. Dowiedziałem się, że prawdziwy
styropian -- Styrofoam -- NIE jest tym zwykłym białym styropianem, którego
używa się na przykład do pakowania. To poliestyren ekstrudowany (XPS),
używany do ocieplania budynków. Oryginalny Styrofoam firmy Dow okazał się
bardzo drogi; na szczęście istnieją zamienniki, takie jak
Ursa
XPS.
Tutaj
kupiłem 3 m2 XPS-u o grubości 3 cm
za około 50 zł. Ścianki zostały ostrożnie przycięte i sklejone ze sobą przez
moją żonę. Cała kapsuła NIE jest hermetyczna i nie powinna taka być.
Obłożyłem pojemnik dodatkową izolacją, składającą się z wielu warstw koca
ratunkowego, przedzielonych nylonowym materiałem firankowym. Taka izolacja
odbija ciepło wytwarzane przez ładunek z powrotem do środka.
Większość grup balonowych używa koców ratunkowych z aluminizowanego Mylaru
(folia NRC). Aluminizowany Mylar jako izolacja ładunku ma jedną wadę:
blokuje odbiór radiowy, wymuszając albo zastosowanie zewnętrznych anten GPS
i GSM, albo nie izolowanie pokrywy pojemnika. Na szczęście udało mi się
znaleźć niealuminizowany koc ratunkowy (folię), który działał równie
dobrze, ale pozwolił mi zostawić GPS w środku i użyć wewnętrznej anteny
telefonu. Pożyczyłem rozwiązanie od
KNSP --
rękaw z nylonu rip-stop (tkaniny spinakerowej) na cały pojemnik. Z
wykonaniem rękawu pomogła mi moja niezastąpiona żona -- to prawie w całości
jej dzieło. :-) Rękaw chroni izolację z koca ratunkowego i mocuje pokrywę
do pojemnika za pomocą rzepów. Służy też za wspornik całego ładunku i
miejsce zaczepienia spadochronu (w rogach rip-stopu wszyte zostały cztery
nylonowe paski z metalowymi kółkami do kluczy). Na dole pojemnika
przykleiłem amortyzator wstrząsów z pięciocentymetrowej warstwy pianki gumowej, by zapewnić
miękkie lądowanie. Testy wykazały, że dzięki amortyzatorowi kapsuła zawsze
ląduje na tym samym boku.

| 
| 
| 
|
| Izolacja pojemnika ładunku | Wnętrze pojemnika | Pojemnik | Bez pokrywy |
Jeśli chodzi o gaz, są dwa do wyboru: wodór lub hel. Profesjonaliści używają
wodoru, ponieważ jest znacznie tańszy. Niestety, jest też wyjątkowo palny
i wybuchowy. Balony i wodór to nie najlepsze połączenie -- ten, kto pamięta
katastrofę Hindenburga, będzie wiedział, co mam na myśli.
Hel wziąłem z firmy Linde
Gaz, dwie butle po 5,6 m3 (niestety, nie mieli już butli
7 m3), po 350 zł za butlę. Według wzorów z
arkusza kalkulacyjnego obliczeń helowych macfreaka, przygotowałem drobny, ale przydatny
skrypt GNU bc do obliczania ilości potrzebnego
helu. Napełnianie balonu przed startem potwierdziło, że obliczenia były
poprawne.
Przygotowałem urządzenie do napełniania balonu podobne do takiego, jakiego
używają meteorolodzy. Tutaj za około
150 zł kupiłem przemysłowy reduktor helowy i podłączyłem do niego trzymetrowy
wąż tlenowy. Po stronie napełniającej znajduje się calowa pokrywka na rurę
PVC z wydrążonym pośrodku otworem. Wąż ma na końcu gwint, przykręcony do
otworu w pokrywce przelotką "beczką". Do pokrywki przyklejony
jest (klejem do PVC) trzydziestocentymetrowy kawałek calowej rury PVC; przy napełnianiu wylot balonu nakłada
się na rurę. Do rury przymocowana jest pętelka ze sznurka sizalowego do
mierzenia siły udźwigu balonu (5 kg wagą sprężynową, do dostania w sklepach
wędkarskich). Wszystko zabezpieczone jest czarnym silikonem (RTV).
| 
| 
| 
|
| Reduktor helowy | Pokrywka PVC | Dysza napełniacza | Różne kleje i dodatkowe elementy |
Najwygodniej byłoby wypuścić balon z Warszawy czy z jakiegoś miejsca
niedaleko miasta. Nie mogło jednak być o tym mowy -- lot z pewnością
stworzyłby zagrożenie dla ruchu powietrznego, a ładunek mógłby wylądować na
dachu jakiegoś wieżowca. Zdecydowałem się na start z wybranego punktu na obszarze o promieniu
150 km wokół Warszawy. Po przestudiowaniu map, wyeliminowaniu bagien, lasów,
gęsto zaludnionych obszarów itp., wybrałem wieś Dziembakowo koło Sierpca.
To równina z kilkoma małymi lasami. Dostałem zezwolenie dwa tygodnie przed
datą startu, ustaloną na 20 czerwca 2006. Trzy dni przed startem wynajęliśmy
butle z helem, przeprowadzone zostały ostatnie testy systemów. Niestety,
testy wykazały problem z radiem -- prawdopodobnie spalony tranzystor stopnia
końcowego. Nie było już czasu na diagnostykę i naprawy, zdecydowałem się
więc polegać na systemie zapasowym -- telefonie GSM. Wieczorem w przeddzień
startu zapakowaliśmy wszystko do samochodu. Ostatni test w docelowej
konfiguracji potwierdził, że elektronika działa; zestawy baterii zostały
zamknięte i zabezpieczone w środku ładunku.
Nie udało się nam wyspać (i tak nie mógłbym spać); wyruszyliśmy o 5:30.
Ruch uliczny o tej nieludzkiej dla mnie godzinie był lekki, szybko
zostawiliśmy Warszawę za sobą i dostaliśmy się na trasę. Droga na miejsce
startu trwała dwie godziny i byłaby całkiem przyjemna, gdyby nie butle z
helem, tak długie, że nie zmieściły się poziomo w bagażniku sedana.
Musieliśmy położyć tylne siedzenie. Siedziałem na złożonym siedzeniu,
obijając się głową o dach kilkaset razy. ;-)
Dotarliśmy na miejsce sporo przed czasem (była 8:00, a czas startu w
zezwoleniu określony był na 11:00). O dziesiątej zadzwoniłem do kontroli
obszaru w Warszawie, potwierdziłem start, po czym przystąpiliśmy do
przygotowań. Zważyłem cały system (ładunek, linkę i spadochron), dodałem do
tego wagę balonu i trzy funty (1,36 kg) siły wznoszenia (chciałem, by balon
wznosił się najszybciej, jak to możliwe), włączyłem awionikę ładunku
i zostawiłem działającą elektronikę, żeby potwierdzić, że działa poprawnie
i rozgrzać pojemnik od środka. Wynieśliśmy butle z samochodu,
przygotowaliśmy urządzenie do napełniania i rozwinęliśmy balon na
rozłożonych na ziemi prześcieradłach, żeby ochronić lateksową powłokę przed
ostrymi roślinami i szkłem (na ziemi było rozbite szkło -- prawdopodobnie
było to miejsce pikniku jakiejś lokalnej kompanii pijackiej :-).
Dwadzieścia minut przed startem zaczęliśmy napełniać balon. Spodziewałem się
problemów przy napełnianiu, ale nie było żadnych. Wszystko poszło
perfekcyjnie. Kiedy balon podniósł się z ziemi, zaczęliśmy mierzyć siłę
wznoszenia. Musiałem zmienić butlę dla uzyskania ostatnich kilkuset gramów
siły. Zdecydowałem się na dwa funty zamiast trzech, przestałem więc dodawać
helu i zawiązałem dyszę balonu. Trzymałem balon (niełatwe to zadanie,
przytrzymywać balon o średnicy dwóch metrów, generujący 5 kg siły
wznoszącej), a moja żona przywiązała linkę do dyszy, spadochron do linki
i ładunek do spadochronu. Z przerażeniem zauważyliśmy, że linka była lekko
postrzępiona w jednym miejscu, ale nic już nie mogliśmy z tym zrobić.
Sprawdziłem działanie komputera pokładowego i fix pozycji GPS-u
i zacząłem wypuszczać balon, potem spadochron, a na końcu ładunek (linka
otarła mi skórę nawet przez rękawice). Balon wzniósł się o wiele szybciej,
niż oczekiwałem. Zadzwoniłem znów do kontroli obszaru w Warszawie,
potwierdziłem start i podałem im prędkość wznoszenia. Ostatni SMS otrzymałem
z wysokości 650 m, dokładnie tak, jak oczekiwałem. Wszystkie systemy działały
poprawnie. Po kilku chwilach obserwacji balonu zapakowaliśmy wszystko do
samochodu i postanowiliśmy poszukać miejsca w cieniu -- było południe
i zaczęliśmy czuć się jak jajka na patelni. :-)
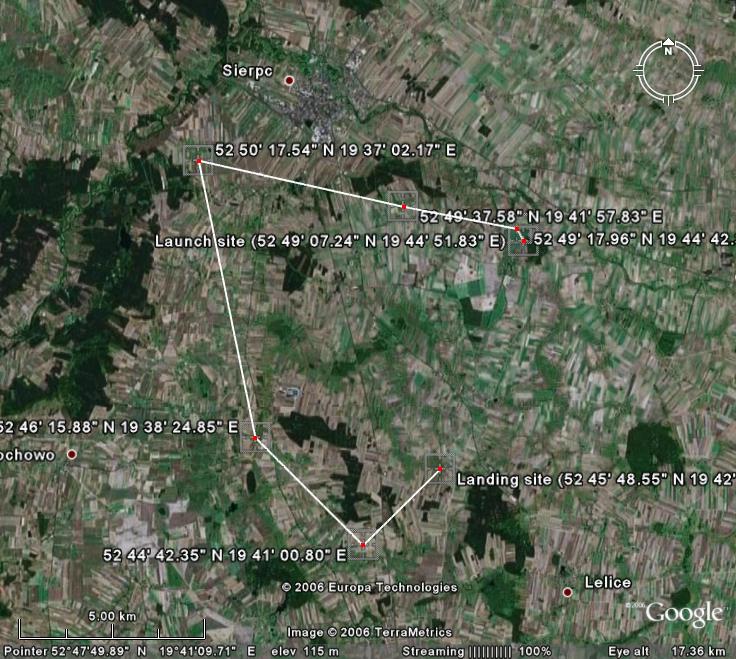
Po troszkę więcej niż półtorej godzinie, dostałem pierwszy SMS z ładunku!
Wszystkie systemy nadal działały poprawnie, był też pewny fix GPS z aż
dziesięcioma używalnymi satelitami; wysokość 127 m n.p.m.
potwierdziła, że ładunek wylądował. Szybko wywołałem mapę na moim PDA i
wprowadziłem współrzędne. Byliśmy zaskoczeni, że lądowanie nastąpiło tylko
6,5 km od miejsca startu. Pojechaliśmy w kierunku współrzędnych z balonu
tak szybko, jak pozwalały przepisy :-)
(w obawie, że ktoś może ukraść ładunek). Wysiedliśmy z samochodu i
stwierdziliśmy, że nigdzie nie widać ładunku, przełączyłem się więc na
program nawigacyjny w PDA
(używam BeeLineGPS)
i zaczęliśmy ustawiać się na odpowiedniej szerokości geograficznej.
Wszystko wskazywało na to, że ładunek wylądował na polu, więc weszliśmy na
nie i zaczęliśmy mały terenowy survival. ;-) Wszędzie rosły maliny i
pokrzywy, więc zostaliśmy mocno podrapani (i, jak się później okazało,
jeszcze mocniej poparzeni słońcem). Za każdym razem, kiedy wydawało się nam,
że jesteśmy blisko ładunku, dzwoniłem do jego telefonu, żeby uruchomić
sygnalizator piezoelektryczny, ale niczego nie słyszeliśmy. Postanowiliśmy
zmienić podejście na bardziej matematyczne i dokładnie ustawiliśmy szerokość
i długość geograficzną. Znaleźliśmy! Ładunek leżał na boku tylko około 15-20
metrów od pozycji zgłaszanej przez GPS. Pozostałości balonu były ciągle
przyczepione do linki i mocno zwinięte w ciasną kulkę -- myślałem, że razem
z balonem podniosłem jakiś kamień. Wróciliśmy do samochodu, ściągnęliśmy
zdjęcia z obu aparatów i dane z komputera pokładowego na laptopa i
wyłączyliśmy systemy elektroniczne ładunku. Oględziny nie wykazały żadnych
uszkodzeń, ani jednej rysy. Misja powiodła się! Czas na powrót do domu.

| 
| 
|
| Cygnus-2 wznosi się | Tam jest! Odnalezione miejsce lądowania | Miejsce lądowania |